- 課題
-
ロボットなど連続的に動くユニットの位置および姿勢をリアルタイムで監視し制御したい。

ソリューション
動的計測システムMoveInspectを使用し、ロボットの位置および姿勢をXYZ座標だけでなく、ヨー・ピッチ・ロール(XYZそれぞれの軸の回転角度)を含めた6自由度でオンライン計測することでロボットの位置決めをリアルタイムで実施することが可能です。6自由度で制御することで、XYZ位置が合っていても実は斜めに傾いてしまっているといった問題を防ぐことができ、正確な位置と姿勢に合わせることができます。
ご提案内容
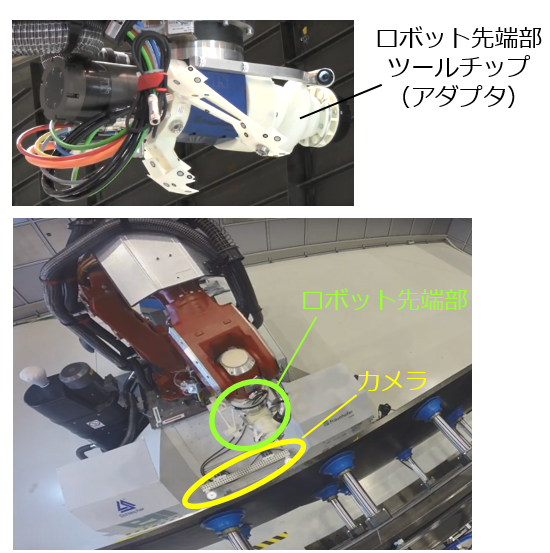
MoveInspectHF4(カメラ)+ ソフトウェア
複数のターゲットマーカーをロボット/ユニットに取り付け、事前に剛体のアダプタとしてソフトウェアに登録しておくことで、対象物(アダプタ)の位置および姿勢を6自由度でリアルタイムに監視し制御することが可能です。また、基準ポイントを設け、そのポイントとアダプタを同時に測定することで、ダイナミックリファレンス機能が働き、測定データは振動による影響を受けません。特に振動のある現場では効果的なシステムです。
システム構成

システムイメージ