








自動車製造工場では、工程ごとに様々な計測タスクがあります。中でもドア等のプレス部品においては、摩耗による金型の形状変化から発生するプレス成型品の変形を管理することが重要で、変形度合いが許容値を超えないように、こまめな製品の抜き取り検査が欠かせません。計測頻度が高く、計測者の工数がひっ迫されます。
このようなプレス部品の抜き取り検査を自動化したいお客様は少なくありません。自動システム導入には2つのオプションがあります。
- 新規工場立ち上げや既存工場レイアウトを変更しての自動機導入
- 既存工場レイアウトへの自動機導入
ただ、前者では多大なるコストが発生し、後者では大掛かりな自動機を設置できるスペースの余裕がありません。さらには、今後様々な車種に対応するためにフレキシブルさ(柔軟性)も求められます。
そのような環境下で敷地面積の確保と十分な安全対策が必要な産業用ロボットを投入したいでしょうか。自動車のプレス部品の製造現場では、次のような計測課題が挙げられます。
- 課題
-
- 人による測定作業では、測定精度および作業スピードのバラツキや、人的ミスが発生しやすい
- 産業用ロボットを用いた自動計測システムも一つの解決策になるが、産業用ロボットでは安全柵で囲まれた専用の計測場所が必要になる
- プレス部品は特に形状と穴(要素)の中心位置を高精度に測定したい
自動計測を推進したいが、安全対策や工場レイアウト変更といった大改造に踏み出すには抵抗があり、なかなか自動化を実現できていません。
ご提案内容
スキャナーを持たせた協働ロボットをAGVまたはAMR※に載せることで、測定対象物のある場所まで自動で移動して測定します。
1. 人のそばでロボットが作業できる(安全柵が不要)
産業用ロボットは高速に動き危険なため、人のそばで作業を行うことができず、安全柵の設置が必要不可欠です。そのような安全柵を設置する場合、ロボットの稼働領域を考慮して大きな敷地面積をロボット専用に確保する必要があります。
協働ロボットは速度と力を監視し安全なため、人のそばで作業が可能です。専用の安全柵を立てたり、従来の工場レイアウトを大きく変える必要がありません。
2. ロボット精度に依存せずに形状と穴位置を高精度測定
スキャナー位置をリアルタイムに認識するトラッカーシステムにより、ロボットの精度に依存しない高精度な測定を実現します。プレス部品の測定で重要となる形状と穴の中心位置の高精度測定を実現します。
3. 人による測定のバラツキや人的ミスを排除
人による測定では作業者の経験値やその日のコンディション等にも左右されるため、人による精度のバラツキがつきものです。しかしロボットによる自動測定では、事前に定義したスキャン動作のため、毎回一定の速度で同じ軌跡で測定でき、点群データの品質が安定します。
※ AGV:Automatic Guided Vehicle 磁気テープや磁気棒によるガイドに従って移動
AMR:Autonomous Mobile Robot タブレット等の指令で自由に移動
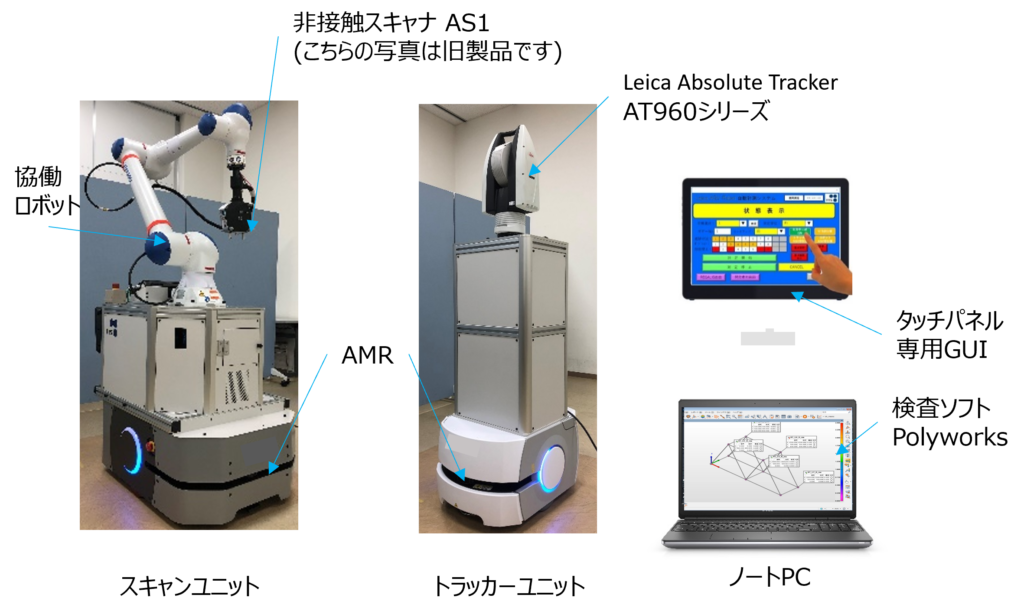
システム構成
スキャンユニット(Absolute Scanner AS1+協働ロボット+AMR)
人のそばで作業ができる協働ロボットに非接触スキャナを取り付け、AMRに搭載。トラッカーユニットとワークの位置に合わせて適正位置へ移動(事前ティーチングあり)。位置決めが完了したら事前にプログラムした経路スキャナーによって自動で形状測定。
Leica AS1スキャナーに関する製品情報はこちらをご確認ください。
ノートPC(検査ソフト)
測定終了後、検査ソフトPolyWorksにより、CADとの比較や穴位置などを自動で検査し、任意の形式で検査レポートを出力。
まとめ
このように、Leica協働ロボット+AGV/AMRによる自動計測システムにより、既存の製造工場のレイアウトを大きく変えずに、安全柵無しに安定した高品質の抜き取り検査を可能にします。このソリューションは、今後計画される新たな車種にも対応できるため、柔軟性の高いソリューションとしてお客様からもご好評をいただいています。
詳細につきましてはお気軽にお問合せください。
弊社ではご提案できるソリューションを多数用意しております。
ぜひ、お困りごとをお聞かせください!

