









東京貿易テクノシステム株式会社(TTS)は、「汎用設備の連動による高性能な自律型自働建付測定技術の開発」で、トヨタ自動車九州株式会社様、株式会社トヨタプロダクションエンジニアリング様と共同でトヨタ自動車株式会社様より「技術開発賞」を初受賞いたしましたのでお知らせいたします。
「技術開発賞」は、革新的な技術でものづくりを推進したサプライヤーに授与される賞で、トヨタ技術関連の賞の中でも最も栄誉ある賞の一つで、TTSの技術の高さが「世界のトヨタ」に評価された受賞です。
受賞内容
課題
完成車両の抜き取り検査において作業者が手測定で500~900カ所の測定を行っており、その為1日に2台の検査が精一杯。検査台数が少なく有効な傾向管理ができませんでした。また、従来の自動建付測定設備を作成する為にはおよそ1億円以上の投資と測定のための広いスペースが必要。
ソリューション
測定器と協働ロボット、およびAMRをプログラムで組み合わせたTTSの自働建付測定システムでは、協働ロボットの使用で人との隔離が不要となり、またARM*で自由に動き回ることで、設備スペースは他社設備の1/2、また投資コストは1/3で済むこととなりました。*AMR:Autonomous Mobile Robot 自律走行型ロボット
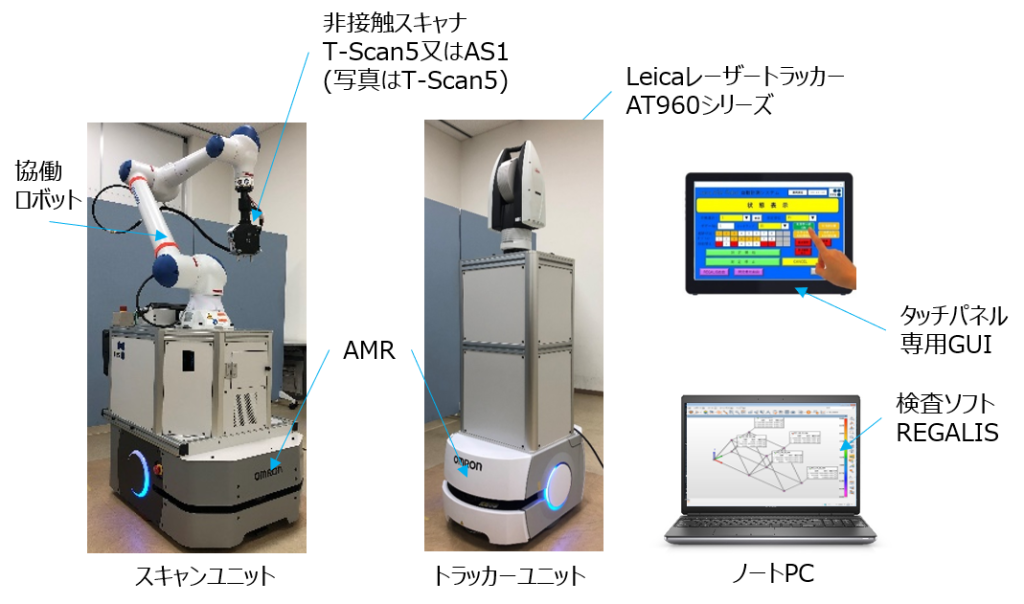
システム構成
測定風景

「測定機」「協働ロボット」「AMR」、すべてを「連動させるプログラム」によるシステム
使用されている技術は以下の3つです。
- LeicaAT960レーザートラッカーとT-Scan5の機能を利用したAMR位置補正技術 AMRの停止精度は±100㎜。100㎜ずれると測定中にスキャナと車両が衝突する恐れがあります。その為、スキャナの位置を読み取り、AMRに補正を行うことで±10㎜まで停止精度を実現。
- ロボット補正技術
見切りの測定はオフラインでシミュレーションした位置と少しでもズレるとデータが抜け、測定できないことがあります。その為、シミュレーションの位置に近づける為AMRで補正しきれない±10㎜のズレをロボット側で補正を行います。 - トラッカー段替え(基準置き換え)技術
トラッカーとスキャナは常に5m以内かつトラッカーからスキャナが見えている必要があります。車両全周を測定するにあたりロボットの位置に合わせてトラッカーの位置を変えなければなりません。それを自動で行うためにスキャナの位置情報を元にトラッカーを移動させています。
重要なのは車両の位置に関わらず、常に車両とロボットの位置が同じで同じ軌道で測定できる点です。それにより高精度測定が可能となり、車両に衝突することなく安全に自働測定が実現できます。
TTSは今後も最新鋭の技術・コンセプトを取り込んだソリューションの継続的な開発・提供により、常に変化する顧客・市場の課題に果敢に挑戦し、解決、そして、持続可能な社会をめざしてビジネス、あるいは会社として出来る手段を通して、永続的に社会に貢献してまいります。