- Mission
-
Monitor and control the position and posture of a unit which moves continuously such as a robot.

Solution
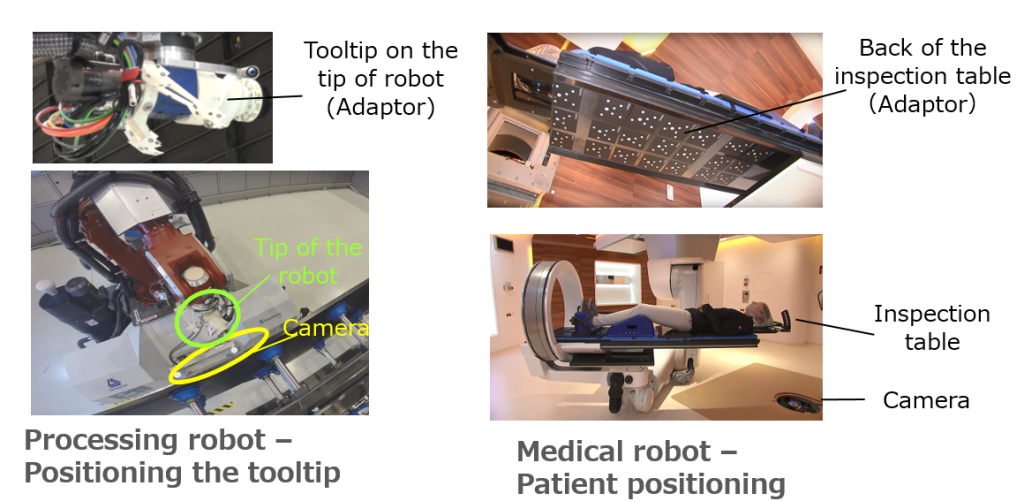
Using the dynamic measurement system MoveInspect, the robot’s position and posture are measured online with 6 degrees of freedom including not only XYZ coordinates but also yaw, pitch, and roll (rotation angle of each axis of XYZ) and they can be implemented in real time. By controlling with 6 degrees of freedom, it is possible to prevent problems such as tilting even if the XYZ position is correct and match the exact position and posture.
Proposal Contents
3D Arena+ Software
By attaching multiple target markers to the robot / unit and registering them in the software as rigid adapters in advance, the position and orientation of the target (adapter) can be monitored and controlled in real time with 6 degrees of freedom. In addition, by setting a reference point and measuring the point and the adapter simultaneously, the dynamic reference function works and the measurement data is not affected by vibration. It is an effective system especially at sites with vibration.
System Configuration

System Image